実現したいこと
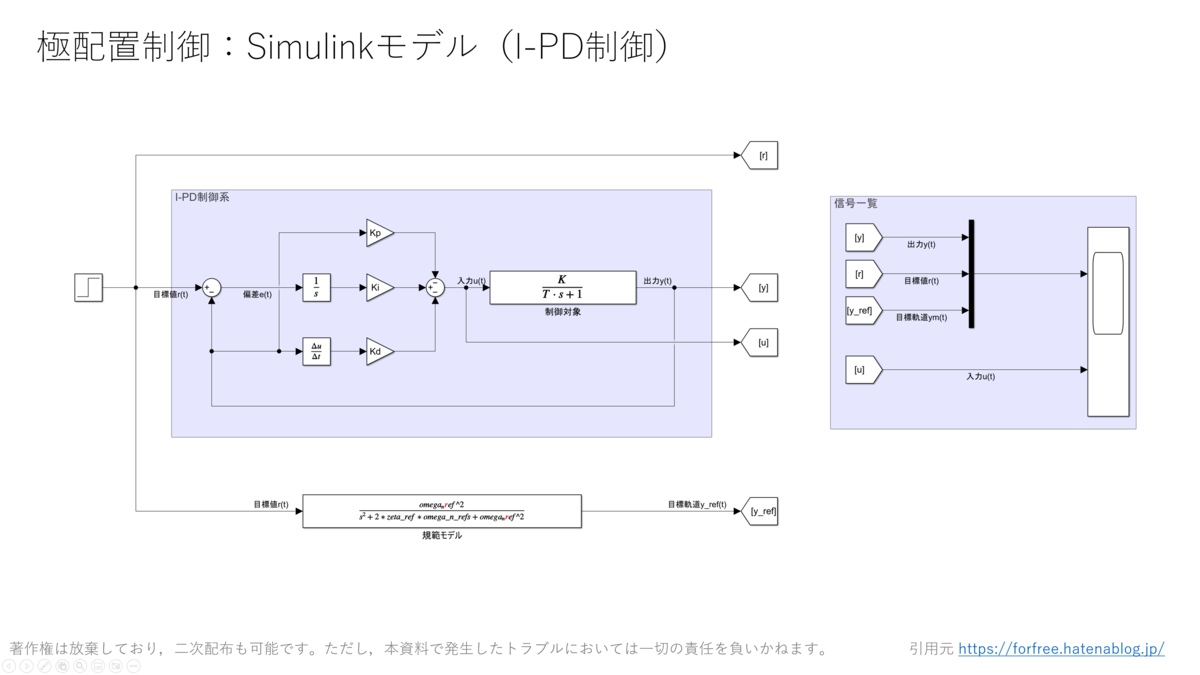
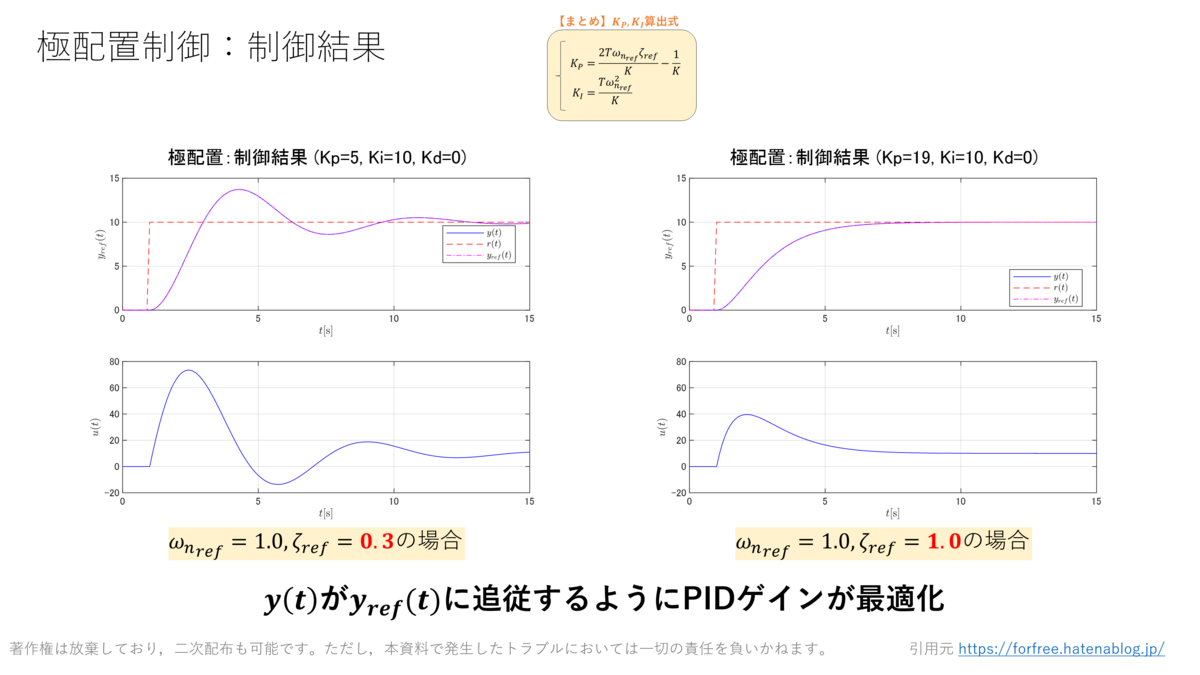
- 規範モデル
を用いてPIDゲインを最適化
が
に追従するようにPIDゲインを算出
- 極配置制御を利用
- 制御対象が一次遅れ系であれば,微分ゲイン
が不要な理由まとめ



上記のppt素材は下記を参照(I-PD制御系の閉ループ伝達関数導出含む):
ppt素材:PID制御系関連(無料公開) - 某国立大学教員の本気ブログ
Matlabのバージョン
Matlab2021a
※ダウンロード形式として過去のバージョンも用意
必要なtoolbox
ダウンロードURL
【ダウンロードリンク】
※ご利用中のMatlabバージョンのフォルダをダウンロードしてください。
例:2021aバージョンであれば,上記リンクの「2021a」を選択
※上記プログラムの利用で生じたトラブルは一切の責任を負いかねます。
フォルダ構成
上記ダウンロードし展開。
(下記のようなフォルダ構成になっていることを確認)

実行方法
「Main_PolePlacement_RefModel_2ndOrderSystem.m」を実行
